ICARA 2021
February 4-6, 2021 - Prague, Czech Republic / Virtual Conference
As coronavirus spreads worldwide, most authors face travel problem. Considering the safety of participants, 2021 IEEE 7th International Conference on Automation, Robotics and Application (ICARA 2021) has been converted to a virtual conference.
ICARA 2021 conference proceedings has been archived in IEEE Xplore 1 month after the conference, and be indexed by Ei Compendex and Scopus within 3 month.
|
|
|
|
ICARA 2021 Conference Proceedings |
ICARA 2021-Group Photo |
KN-Prof. Ramesh K. Agarwal, Washington University in St. Louis, USA (IEEE Fellow) |
KN-Prof. Danica Kragic, Royal Institute of Technology (KTH), Sweden (IEEE Fellow) |
|
|
|
|
KN-Prof. Xin-She Yang, Middlesex University, UK |
PS-Prof. Hamid Reza Karimi, Polytechnic University of Milan, Italy |
PS-Assoc. Prof. Xuping Zhang, Aarhus University, Denmark |
Host-Assoc. Prof. Petr Valášek, Czech University of Life Science Prague, Czech Republic |

Session Group Photo:
|
|
|
Session 1: Mobile Robots and Motion Planning |
Session 2: Mechanical Design and Control Engineering |
Session 3: Unmanned Systems and artificial Intelligence |
|
|
|
Session 4: Computer and Communication Technology |
Session 5: Robot Design and Control |
Session 6: Machine Vision and Applications |

.jpg)
.jpg)
Excellent presenters of each session:
AM516: Obtaining Robust Control and Navigation Policies for Multi-Robot Navigation via Deep Reinforcement Learning
Presenter: Christian Jestel, Fraunhofer IML, Germany
AM544: Long-Term Exploration in Unknown Dynamic Environments
Presenter: Daniel Duberg, KTH Royal Institute of Technology, Sweden
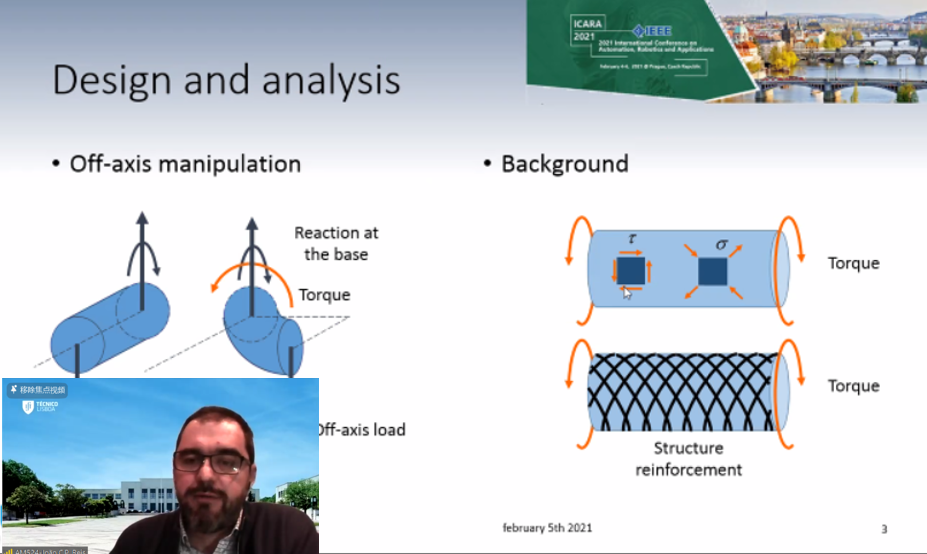
AM524: Towards a highly integrated 3D printed soft continuum manipulator
Presenter: João C.P. Reis, Universidade de Lisboa, Portugal
AM553: An approach of Scenario-based Threat Analysis and Risk Assessment of Over-The-Air updates for an Autonomous Vehicle
Presenter: Marzana Khatun, Kempten University of Applied Sciences, Germany
AM533: Robust Approaches for Localization on Multi-Camera Systems in Dynamic Environments
Presenter: Marco Sewtz, Deutsches Zentrum für Luft- und Raumfahrt, Germany
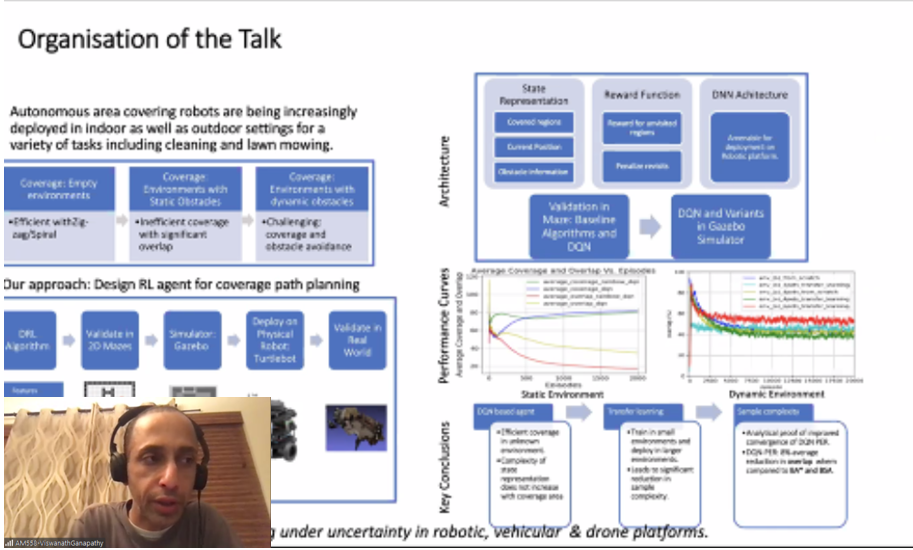
AM558: Deep Reinforcement Learning Based Online Area Covering Autonomous Robot
Presenter: Viswanath Ganapathy, LG Electronics, USA
AM529: Image-Based Visual Servoing of Rotationally Invariant Objects Using a U-Net Prediction
Presenter: Norbert Mitschke, Karlsruhe Institute of Technology, Germany
|
|
|
|
|
|
|